On one of the usual sources of weird electronics I came across quiet unusual SFP+ module and could not resist buying it to see how it works. For now I was unable to make it work, but at least I made few photos of its internals. It turned out its main part is obscure chip made by Semtech and described as GN1157, which serves as laser diode driver. Obviously obtaining datasheet is impossible even in China. However, thanks to being able to see the board, I was able to reverse engineer some part of its pinout. Continue reading “Pinout of laser driver for CPRI SFP+ module – GN1157”→
Some of you may have already heard about new RISCV board that popped up in China recently. It is called Nezha and is the first available SBC having new Allwinner D1 SoC with RISCV core and capable of running Linux. Authors are marketing it as first affordable RISCV Linux SBC and there is a lot of truth in these claims. Maybe this board cannot compete in any way with boards based on ARM Cortex A cores. On the other hand all previous RISCV offerings were in different galaxy in terms of price tag. $999 for Hifive Unleashed during its Crowdsupply campaign vs. $99 for Nezha on Indiegogo. They even claimed to go down as low as to $12, but as they say global supply chain problems made it impossible for now. We have to wait for all this pandemic troubles to end to check, if these claims could be verified by facts. Continue reading “Unboxing, startup and first impression of Nezha board marketed as first affordable RISCV SBC”→
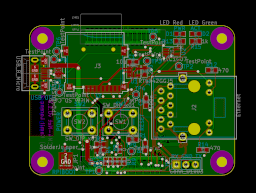
Few days back I published a hint that I am working on some hardware project, that utilized some networking, by publishing KiCAD footprints of connectors that I use. Now the time has come to reveal all the details. This was possible due to board being basically working.
And the project is Raspberry Pi Compute Module 4 carrier/base board. Just to give a brief here, it is a board that is meant to allow connecting CM4 SoM modules to network and take as little space as practically possible. I would call this device smallest possible CM4 carrier board, but then probably somebody will prove me wrong by designing something smaller. But to still be practical, it is almost the smallest it could, as it is exactly same footprint as CM4 itself. By making it even smaller, I would have to remove mounting holes, as they are exactly at the edges.
Getting to the interesting part, it is meant to connect to Ethernet and allow you to do whatever you like. The only thing you need to connect beside Ethernet is power via Micro USB connector. Worth to mention is that this is requirement of this particular iteration of the board, as it should be fairly easy to redesign it a bit to use PoE instead. Anyway, comparing to traditional Raspberry Pi, you get a lot of saved space at a cost of only 3 connector available (not counting UART header). And third, not mentioned yet, is microSD card slot, that is completely optional, but present in my case, as I use CM4Lite variant with no storage, so this is rather a useful feature. Getting rid of this requirement on CM4Lite SoMs might be a subject of future research from my side, as I heard about network boot on RPi, but have not tried it myself yet. Continue reading “uCM4 – really small CM4 carrier board for network projects”→
This time just a quick info. I just published library of KiCAD footprints that I made recently for my new project. The project itself has not been published yet and I want to keep it that way until I get first working prototype (what I hope will happen really soon). Meanwhile I am publishing this small library of footprints that I made for it with perspective of extending it in future with other hardware projects.
Still this is quite new topic for me as I have no electronics education, nor professional experience, so there is still a risk that I may fail at what I do and abandon such kind of projects. But for now, I just finished validation of footprints published here with a board that I ordered from JLCPCB, so you are guaranteed that they are fine (except one marked explicitly as such). Continue reading “My small library of KiCAD footprints”→
For some time already, I am working on a big reverse engineering topic. I hope, I will be able to present something on that in future. Of course this would be something almost unique, if finished. For now I want to present a tool that I made while working on this big thing (as a side note, it’s not the first one, cc-factory was also created for that purpose).
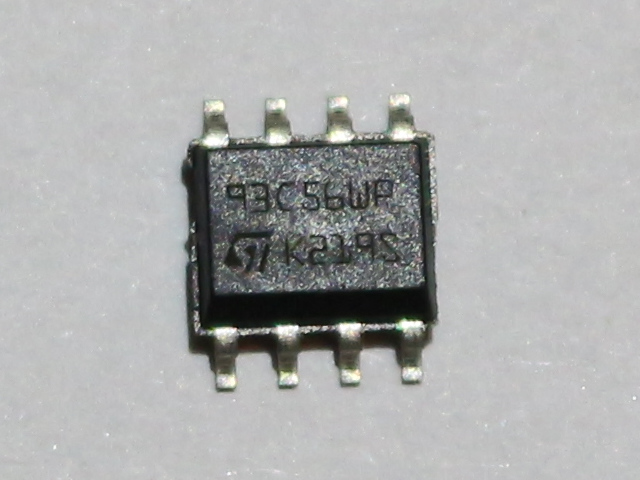
What I had to do, was to read contents of EEPROM, that I found on board, I am analyzing. It is quite obscure, as Google did not return anything useful (beside Taobao auctions). Fortunately I learned that chip it is connected to expect EEPROM from the 93Cx6 series. So, to not break anything, I bought few similar memory chips from usual source. In the meantime, I found that this thing talks Microwire protocol, which is quite similar, but not identical to SPI. This means that flashrom is not an option here. It is however similar enough to SPI that some people were successful in talking to these EEPROMs on SPI bus. Unfortunately, I did not have any device that was confirmed successful and I did not want to experiment with low chance of success. Luckily for me, there is simple Arduino library, that bit-bangs the protocol. I am not a big fan of Arduino, but I have few Digispark boards, so I decided to give it a try. Obviously, the fact that this post appeared means, I was successful. Nevertheless, it was not that easy. At least for me, so I share my experience, just in case someone have similar problem. Enough of this, let’s read (and write, if you want) Microwire 93C56 EEPROM with Arduino sketch and Digispark board, via USB virtual serial port. Because, why not? 🙂 Continue reading “Reading and programming 93Cx6 EEPROM with Digispark”→
GF-07 is dirt-cheap GPS locator. You put SIM card in it, send SMS and you know where it is. That’s it. But not for me. I like to know what I am using, especially if it is that cheap and such obscure device as this one. It comes together with manual that is written in so bad English that I barely understand anything. Immediately after opening SIM slot, one can see few test pads. Fortunately all of them are described in silkscreen. Let’s see what can be done with it as a one-evening hack.
This device could easily be found at the Chinese sellers. They advertise them as DS150E. Under the hood there is nice STM32 and STM8 pair. One is present on main PCB (in my case TCS MAIN V6.0), the other on relay board (TCS+RELAY V3.0). Both chips have their ST-Link headers broken out. If one want to read/write the firmware installed in internal flash, it should be as easy as connecting few of these pins. Continue reading “New VCI+A-BT (DS150E) ST-Link pinout”→
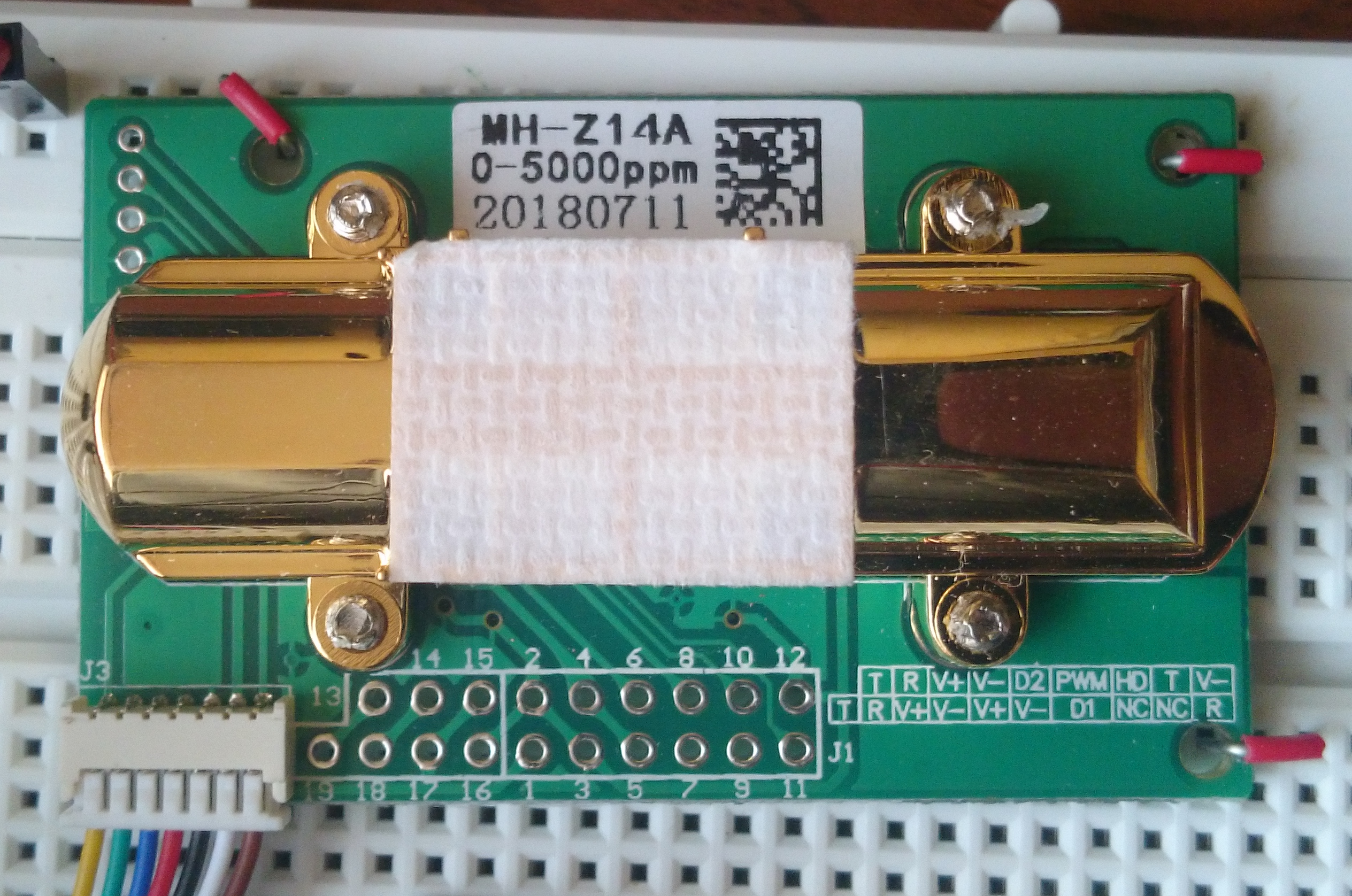
When I have seen CO2 sensor for the first time, it was quite expensive device. Well, if one want to buy consumer device these days, it still could cost a lot. However in the days of cheap Chinese electronics sellers on biggest auction platforms, for makers, situation is quite different now. MH-Z14 is the cheapest CO2 sensor I was able to find. I costs about $19 and comes in few variants: MH-Z14 and MH-Z14A. Also it can measure up to 1000 ppm, up to 2000 ppm or up to 5000 ppm. However the range does not matter in practice, as it is possible to switch between them using UART.
The device interfaces are quite flexible for such a cheap device, as beside mentioned UART port it provides PWM and analog output. However, I was not able to measure valid value using analog and my cheap multimeter. Maybe some more sophisticated equipment is required for that.
I have to make one note here: device I bought is labeled as MH-Z14A and its range is 0-5000 ppm. Other variants might have different features. For mine, there is no UART protocol documentation. Yet, protocol documented under name MH-Z14 works, so be careful. Continue reading “mhz14a – program for managing MH-Z14/MH-Z14A CO2 sensors via UART”→
As I wrote few months ago, I bought tiny WiFi camera, advertised as a spy camera or nannycam. This week, I decided to work on the topic a bit. However, due to some serious failure, I alarmed on Twitter, I was not able to connect to its WiFi hotspot anymore. Therefore I had to use UART to recover it from backup. Below you can find parameters needed to connect to this cam. At first however I want to present any identification numbers, that might be useful to confirm it is the same device, as it has no real name.
Identification
Device overview (rubber package already stripped from PCB)
As can be seen in picture on the right, the device consists of main PCB, camera with tape cable, battery pack and optional USB cable for charging. To be able to reach UART header, I had to strip the rubber package from main board. Below I was able to see two identification strings:
HB-WIFI-Z6 – this is most likely the name of the board, unfortunately neither Google or even Taobao does not know it
MS-ME198407 – this is very interesting, as it seems to mean some internal name of laptop computer (don’t know who is the vendor)
Furthermore on camera tape there is one more magic string – HY-OV9712-6. After first dash it seems to be oh – not to be confused with zero). How do I know it? Because OV9712 is model name of camera optics made by OmniVision and it more or less matches the parameters of the camera.
Last batch of IDs is, at first processor name and vendor, which is quite unusual at least outside China – T10 made by Ingenic, which appear to produce MIPS cores and dev boards for it. Also I can see in logs the board should be called ISVP, which is not necessarily true – see Google. At last cpuinfo says that system type is mango, which appear to be fairly common in cheap Chinese cameras. Continue reading “UART pinout for noname spy camera”→
Few years ago I compiled kernel drivers of cheap USB-to-serial converter for my previous Android phone. It took few years of using new phone, without single custom-compiled kernel module. Now it is time to change it. By the way, I am going to describe what changed and what hacks have to be made to make the process work on stock ROM, provided by Sony.
kernel is the key
First of all, we need kernel. To be precise, kernel sources. Without that, it is really hard to be successful (I don’t want to tell it is impossible, but really hard, believe me). Because Sony is very liberal in terms of cooperation with community, they provide anything required to tinker with the device (obviously together with caution message about warranty loss, but who cares, right? 🙂 ).
First of all, we need to know, which firmware version the device uses. To be found in Android settings, as compilation number, or something like that. For me, it is 23.5.A.0.575. Then, we have to visit Open Devices downloads section and find our firmware. For me, it was a lot of scrolling, as I have no updates available for quite some time. Inside the package, there should be kernel directory, with complete kernel sources. Continue reading “USB to serial converter drivers for Android revisited”→