This article is part of series about reverse-engineering LKV373A HDMI extender. Other parts are available at:
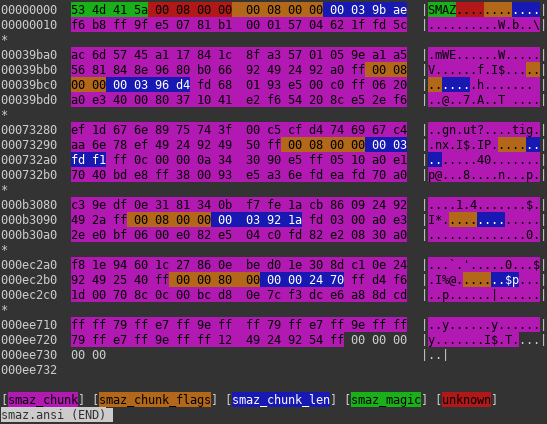
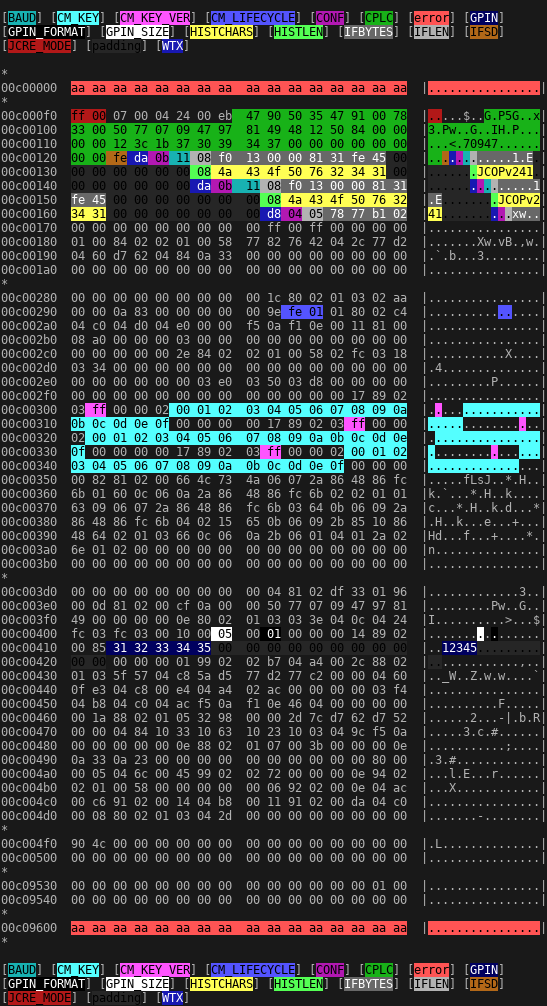
- Part 1: Firmware image format
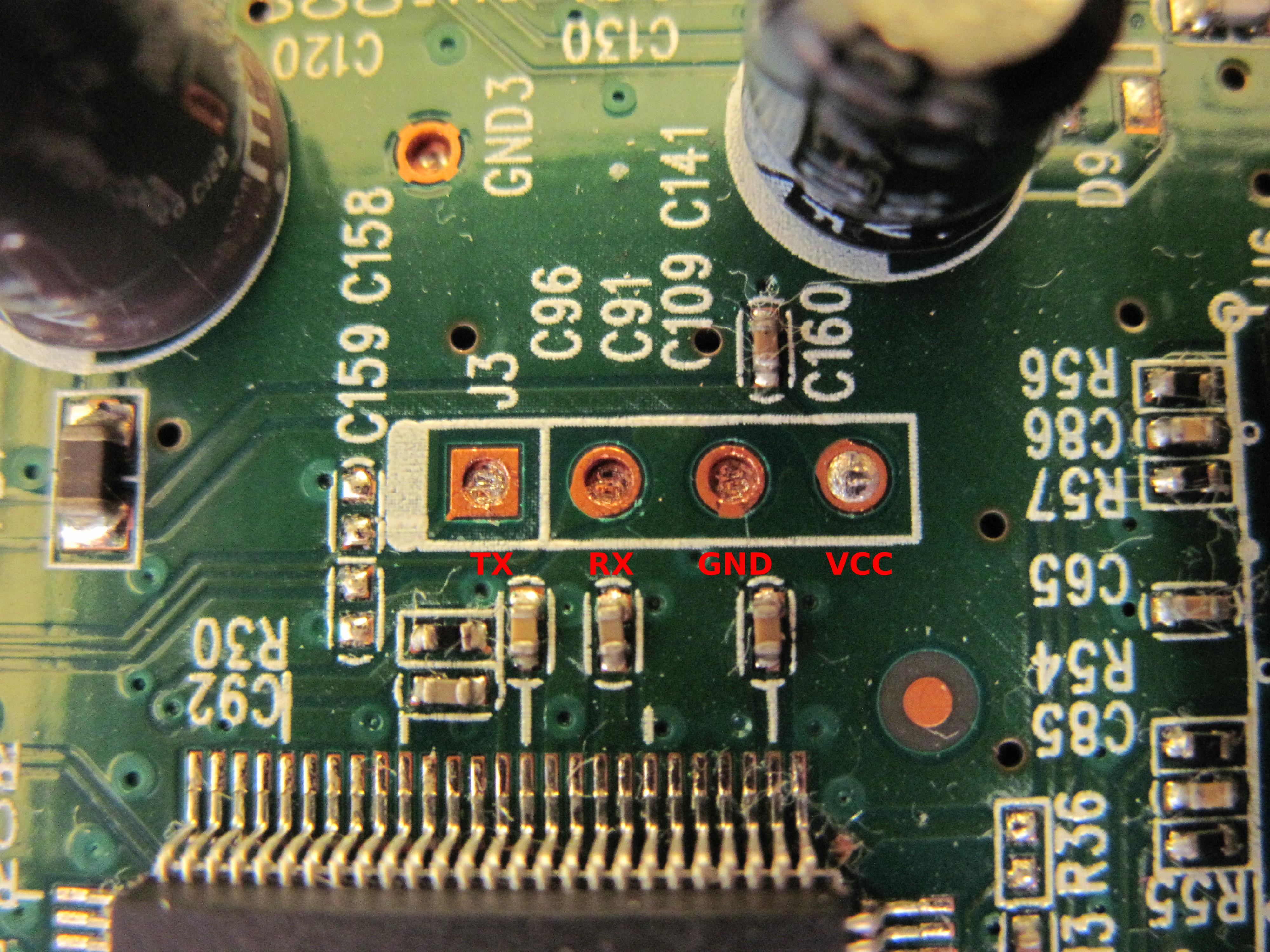
- Part 2: Identifying processor architecture
- Part 3: Reverse engineering instruction set architecture
- Part 4: Crafting ELF
- Part 5: Porting objdump
- Part 6: State of the reverse engineering
- Part 7: radare2 plugin for easier reverse engineering of OpenRISC 1000 (or1k)
After part number four, we already have ELF file, storing all the data we found in firmware image, described in a way that should make our analysis easier. Moreover, we have ability to define new symbols inside our ELF file. The next step is to add support for our custom architecture into objdump and this is what I want to show in this tutorial.
Finding best architecture to copy
If we want to set up new architecture in objdump code, we need to learn interfaces that need to be implemented. It would be easier if we can use some existing code to do so. After some looking into the binutils’ code I learned that what is of special interest are bfd and opcodes libraries. They contain code dedicated to particular architectures. The first one seem to be related to object file handling (which in our case is ELF), so we should not tinker with it too much. Second one is related to disassembling binary programs, so is what we are looking for.
I did some quick examination of source code related to popular architectures and it seems not to be easy to adjust to our needs. Architecture I found to be best suitable for modification is Microblaze. Its source seem to be quite well-written, clean and short. Also from my research of architecture name for LKV373A (part 2, failed by the way) I also remember it is quite similar to the one present in LKV373A, so it is even better decision to use it.
Compiling objdump for target architecture
At first it is useful to learn how to compile objdump, so it will be able to disassemble program written for our target. Microblaze is not really a mainstream architecture, so there aren’t many programs compiled for it available online after typing 'microblaze program elf' into usual search engine. However, I was able to find 2 of them, so I was able to verify that compilation worked. If you can’t find any, I uploaded these to MEGA, so they can serve as test cases. First one is minimal valid file, the other one is quite huge.
Compilation is very easy. The only thing that needs to be done beside usual ./configure && make && make install is adding target option to configure script. So, the script looks as follows:
./configure --target=microblaze-elf
Of course, install step can safely be skipped as well as compilation of other tools, beside objdump. objdump itself seem to be built using make binutils/objdump. However it can’t be build successfully using that shortcut, so whole binutils package must be configured the way, everything not buildable is excluded from the build.
Setting up own architecture
Next step is to add support for our brand new, custom architecture to binutils’ configuration files and copy microblaze sources, so they will simulate our architecture, until we will write our own implementation. Then it should be possible to test objdump again, against our sample microblaze programs and disassembly should still work.
Even without any modification to binutils’ source or configs, it should be possible to configure it for any random architecture. The only constraint is format of the target string: ARCH-OS-FORMAT, where FORMAT is most likely to be elf. So, if we pass lkv373a-unknown-elf as target, it will work. -unknown part is usually skipped and this will not work. If we need it to work, config.sub must be modified. config.sub is used to convert any string, passed to configure into canonical form, so in our case lkv373a-unknown-elf. If it detects, that it is already in canonical form, it does nothing.
Final configure command will be slightly more complex, as we have to disable some parts, that are not of our interest and requires additional effort to work:
./configure --target=lkv373a-unknown-elf --disable-gas --disable-ld --disable-gdb
Although passing something random as target option works on configure stage, it will obviously fail on make stage. What make is doing at first is configuring all the sublibraries. What is of our interest is bfd and opcodes. And the first one fails. So this is the first problem, we need to get rid of.
bfd/config.bfd
The purpose of this file is to set some environment variables depending on target architecture. If it does not know the architecture, it returns error to caller, which is probably bfd’s configure script, called by make. According to documentation in file header, it sets following variables:
targ_defvec– default vector. This links target to list of objects that will provide support for ELF file built for specific architecture (stored inbfd/configure.ac)targ_selvecs– list of other selected vectors. Useful e.g. when we need support for both 32- and 64-bit ELFs. Not needed here.targ64_selvecs– 64-bit related stuff. Used when target can be both 32- and 64-bit, meaningless in our case.targ_archs– name of the symbol storingbfd_arch_info_typestructure. It provides description of architecture to support.targ_cflags– looks like some hack to add extra CFLAGS to compiler. We don’t care.targ_underscore– not sure what it is, should have no impact on our goals (possible values are yes or no)
To sum up, what we need to do on this step is to define default vector, we will later add to configure.ac and set name of architecture description structure. The structure itself will be defined later. Finally, I ended up with the following patch:
@@ -173,6 +173,7 @@ hppa*) targ_archs=bfd_hppa_arch ;; i[3-7]86) targ_archs=bfd_i386_arch ;; i370) targ_archs=bfd_i370_arch ;; ia16) targ_archs=bfd_i386_arch ;; +lkv373a) targ_archs=bfd_lkv373a_arch ;; lm32) targ_archs=bfd_lm32_arch ;; m6811*|m68hc11*) targ_archs="bfd_m68hc11_arch bfd_m68hc12_arch bfd_m9s12x_arch bfd_m9s12xg_arch" ;; m6812*|m68hc12*) targ_archs="bfd_m68hc12_arch bfd_m68hc11_arch bfd_m9s12x_arch bfd_m9s12xg_arch" ;; @@ -924,6 +925,10 @@ case "${targ}" in targ_defvec=iq2000_elf32_vec ;; + lkv373a*-*) + targ_defvec=lkv373a_elf32_vec + ;; + lm32-*-elf | lm32-*-rtems*) targ_defvec=lm32_elf32_vec targ_selvecs=lm32_elf32_fdpic_vec
bfd/configure.ac
Now we need to define vector, we just declared to use for lkv373a architecture.
505 k1om_elf64_fbsd_vec) tb="$tb elf64-x86-64.lo elfxx-x86.lo elf-ifunc.lo elf-nacl.lo elf64.lo $elf"; target_size=64 ;; 506 lkv373a_elf32_vec) tb="$tb elf32-lkv373a.lo elf32.lo $elf" ;; 507 l1om_elf64_vec) tb="$tb elf64-x86-64.lo elfxx-x86.lo elf-ifunc.lo elf-nacl.lo elf64.lo $elf"; target_size=64 ;;
Unfortunately, as we did modifications to .ac script, we now need to rebuild our configure. From my experience, any tinkering with autohell, after solving one problem, creates 5 more. We need to get into bfd directory and reconfigure project:
cd bfd autoreconf
Now, if it worked for you, you should definitely go, play some lottery 🙂 . For me it said that I need exactly same version of autoconf as used by binutils’ developers. Because autoconf is so great, probably what I will show now is completely useless for anyone, but hacks I needed to do are at first to add:
20 m4_define([_GCC_AUTOCONF_VERSION], [2.69])
to the beginning of configure.ac file. Then bfd/doc/Makefile.am contains removed cygnus option at the beginning, in AUTOMAKE_OPTIONS, so we need to remove it. After that doing automake --add-missing, as autoreconf suggests, and then again autoreconf should solve the problem. But, as I said, this will probably not work for you. I can only wish you good luck.
(if were following the steps, you might have noticed that autoconf complained about not being in version 2.64 and we overridden version from 2.69 to 2.69 and it worked 🙂 , don’t ask me, why, please!)
After this step, compilation should start (and obviously will fail miserably on bfd as it misses few symbols). Now its time to make bfd compilable.
bfd/elf32-lkv373a.c
This file is meant to provide support for custom features of ELF file. As we don’t have any, we can safely do nothing here. Good template of such file is elf32-m88k.c as it does exactly this.
One thing that seem to be important here is EM value of architecture described. EM is an enum used in ELF file to define target architecture, so it might be required to adjust in our new elf32-lkv373a.c file. By the way definition of this value have to be added to include/elf/common.h:
433 /* LKV373A architecture */ 434 #define EM_LKV373A 0x373a
It might also be a good idea to add it to elfcpp/elfcpp.h. To make the file compile, it is necessary to add following to bfd/bfd-in2.h as value of bfd_architecture enum:
2398 bfd_arch_lkv373a, /* LKV373A */
bfd/archures.c
As we declared bfd_lkv373a_arch as symbol with CPU description structure, we now need to add this declaration to archures.c, as this is the file, where it will be used. We have to add:
611 extern const bfd_arch_info_type bfd_l1om_arch; 612 extern const bfd_arch_info_type bfd_lkv373a_arch; 613 extern const bfd_arch_info_type bfd_lm32_arch;
bfd/targets.c
Similar situation is in targets.c file. Here we have to provide declaration of our vector as bfd_target. This will be another structure, which seem to be generated automatically, so we should not care about it.
704 extern const bfd_target l1om_elf64_fbsd_vec; 705 extern const bfd_target lkv373a_elf32_vec; 706 extern const bfd_target lm32_elf32_vec;
bfd/cpu-lkv373a.c
This last file, we need in bfd, provides bfd_arch_info_type structure and… that’s it! Can be easily borrowed from cpu-microblaze.c with only slight modifications. One thing that needs explanation here is section_align_power. As far as I understand it, it is power of two to which the beginning of the section in memory must be aligned. It should be safe to put 0 here, as we are not going to load our ELF into memory.
This should close the bfd part of initialization. As you can see, there was no development at all to be done here. Let’s now go to opcodes library.
opcodes/configure.ac
At first we need to define objects to build for LKV373A architecture in opcodes library. This is quite similar to what we had to do in configure.ac of bfd library.
282 bfd_iq2000_arch) ta="$ta iq2000-asm.lo iq2000-desc.lo iq2000-dis.lo iq2000-ibld.lo iq2000-opc.lo" using_cgen=yes ;; 283 bfd_lkv373a_arch) ta="$ta lkv373a-dis.lo" ;; 284 bfd_lm32_arch) ta="$ta lm32-asm.lo lm32-desc.lo lm32-dis.lo lm32-ibld.lo lm32-opc.lo lm32-opinst.lo" using_cgen=yes ;;
Hopefully, -dis file will be enough to be implemented. I’ve made a copy from microblaze configuration. The same way we will copy whole source file and any related headers in the next step.
Now, similarly to bfd’s configure.ac, we have to reconfigure it. And again, nobody knows what errors we will encounter.
opcodes/disassemble.c
The only thing that have to be done here is to set pointer of disassemble function. For this following snippets should be added:
53 #define ARCH_lkv373a
255 #ifdef ARCH_lkv373a 256 case bfd_arch_lkv373a: 257 disassemble = print_insn_lkv373a; 258 break; 259 #endif
And to disassemble.h:
62 extern int print_insn_lkv373a (bfd_vma, disassemble_info *);
opcodes/lkv373a-dis.c
This is, where real stuff will happen. As our goal, for now, is not to make implementation of LKV373A architecture, but rather set everything up, so objdump will build, we can copy source file from microblaze-dis.c. It is also required to copy headers, related to MicroBlaze, used by this file, so:
- opcodes/microblaze-dis.h
- opcodes/microblaze-opc.h
- opcodes/microblaze-opcm.h
And change include directives in them to link to lkv373a file, rather than microblaze ones.
Now, optionally we could change names of any symbols referring to name microblaze, but this should not be required, as original microblaze files should not be included in the build. The only change than need to be done is print_insn_microblaze into print_insn_lkv373a, as this is what we added to disassemble.c.
You should now be able to compile working objdump with LKV373A support (of course with wrong implementation, for now). We can now verify that everything works on slightly modified ELF file for MicroBlaze architecture (EM field must point to LKV373A – value must be 0x373a). Well done!
NOTE: all the steps, done till now are available on tutorial-setup tag in repository on Github.
Functions to implement
Now, finally the real fun starts. Bindings between opcodes library and objdump itself, require at least print_insn_lkv373a to be implemented.
What should happen inside this function is quite simple and can be described in following steps:
- Gets
bfd_vmaandstruct disassemble_info(calledinfobelow) as parameters - Read raw data containing instructions using
info->read_memory_func - Call
info->memory_error_funcin case of any errors - Use
info->fprintf_functo print disassembled instruction intoinfo->stream - Optionally use
info->symbol_at_address_functo determine if there is any symbol declared at address decoded from instructions - If symbol exists, call
info->print_address_func - Return number of bytes consumed
Following is some documentation, I wrote for easier implementation (mostly translated inline comments), of functions to be called:
/** * \brief Function used to get bytes to disassemble * * \param memaddr Address of the current instruction * \param myaddr Buffer, where the bytes will be stored * \param length Number of bytes to read * \param dinfo Pointer to info structure * * \return errno value or 0 for success */ int (*read_memory_func) (bfd_vma memaddr, bfd_byte *myaddr, unsigned int length, struct disassemble_info *dinfo);
/** * \brief Call if unrecoverable error occurred * * \param status errno from read_memory_func * \param memaddr Address of current instruction * \param dinfo Pointer to info structure */ void (*memory_error_func) (int status, bfd_vma memaddr, struct disassemble_info *dinfo);
/** * \brief Pointer to fprintf * * \param stream Pass info->stream here * \param char Format string * \param ... vargs * * \return Number of characters printed */ typedef int (*fprintf_ftype) (void *, const char*, ...) ATTRIBUTE_FPTR_PRINTF_2;
/** * \brief Determines if there is a symbol at the given ADDR * * \param addr Address to check * \param dinfo Pointer to info structure * * \return If there is returns 1, otherwise returns 0 * \retval 1 If there is any symbol at ADDR * \retval 0 If there is no symbol at ADDR */ int (* symbol_at_address_func) (bfd_vma addr, struct disassemble_info *dinfo);
/** * \brief Print symbol name at ADDR * * \param addr Address at which symbol exists * \param dinfo Pointer to info structure */ /* Function called to print ADDR. */ void (*print_address_func) (bfd_vma addr, struct disassemble_info *dinfo);
For easier start of development, this commit can be used as template. You can find effects of implementation according to this description on lkv373a branch of my binutils fork on Github. After this step, you should have working objdump, able to disassemble architecture of your choice.
Alternative way
According to binutils’ documentation, porting to new architectures should be done using different approach. Instead of copying sources from other architectures, developers should write CPU description files (cpu/ directory) and then use CGEN to generate all necessary files. However, I found these files way too complicated comparing to goal, I wanted to achieve, therefore I used the shortcut. In reality, however, this might be a better way, as the final result should be the support for new architecture not only in objdump, but also in e.g. GAS (GNU assembler). If you want to go that way, another useful resource might be description of CPU description language.
Plans for the future
As I am now able to speed up reverse engineering of both instruction set and LKV373A firmware, I am planning to create public repository of my progress and guess operations done by some more opcodes as I already know only few of them. So, I will probably push some more commits to binutils repo as well. I hope this will enable me to gain some more knowledge about LKV373A and allow, me or someone else, to reverse engineer second part of the firmware, which seem to be way more interesting that the one, I was reverse engineering till now.